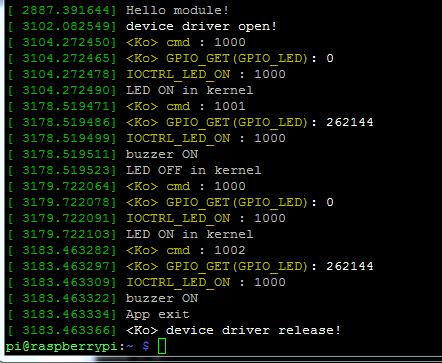
1 누르면 LED 켜지고 부저 한번 울림 (led off 에서 on 상태로 될때만)
2 누르면 LED 꺼지고 부저 두번 울림 (led on 에서 off 상태로 될때만)
3 누르면 프로그램 종료되고 부저 세번 울림 (led는 무조건 off됨)
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/major.h>
#include <linux/io.h>
#include <linux/cdev.h>
#include <linux/version.h>
#include <linux/uaccess.h>
#include <linux/delay.h> //mdelay(10) ->ms, udelay(1) ->us
#define __BCM_2711__
/* BCM2837의 I/O Peripherals 주소*/
#if defined(__BCM_2837__)
#define BCM_IO_BASE 0x3F000000
#elif defined (__BCM_2711__)
#define BCM_IO_BASE 0xFE000000
#elif defined(__BCM_2835__)
#define BCM_IO_BASE 0x20000000
#endif
// GPIO 컨트롤러의 주소
#define GPIO_BASE (BCM_IO_BASE + 0x200000)
// 0x7E2000B0 - 0x7E200000 +4 = 176 + 4 = 180
#if defined (__BCM_2837__) || defined(__BCM_2835__)
#define GPIO_SIZE (180)
#elif defined (__BCM_2711__)
#define GPIO_SIZE (240)
#endif
// GPIO 설정 매크로
#define GPIO_IN(g) ( *(gpio+((g)/10)) &= ~(7<<(((g)%10)*3)) )
#define GPIO_OUT(g) ( *(gpio+((g)/10)) |= (1<<(((g)%10)*3)) )
#define GPIO_SET(g) (*(gpio+7) = 1<<g)
#define GPIO_CLR(g) (*(gpio+10) = 1<<g)
#define GPIO_GET(g) (*(gpio+13) & (1<<g))
#define IOCTRL_LED_ON 1000
#define IOCTRL_LED_OFF 1001
#define IOCTRL_EXIT 1002
#define BUFF_SIZE 1024
#define MAJOR_NUMBER 256
#define DEVICE_NAME "gpio_led"
#define GPIO_LED 18
#define GPIO_BUZZER 19
static char *buffer = NULL; //커널에서 사용 버퍼
static int sz_data = 0; // data size
// I/O 접근을 위한 volatile 변수
volatile unsigned *gpio; // volatile unsigned int 로 써도 됨. int는 생략가능
struct cdev gpio_cdev;
int i,j, state = 0;
void buzzer1(void){
printk(KERN_INFO "buzzer1 ON\n");
GPIO_SET(GPIO_BUZZER);
mdelay(100);
GPIO_CLR(GPIO_BUZZER);
}
void buzzer2(void){
printk(KERN_INFO "buzzer2 ON\n");
for (i=0; i < 2; i++){
GPIO_SET(GPIO_BUZZER);
mdelay(100);
GPIO_CLR(GPIO_BUZZER);
mdelay(100);
}
}
void buzzer3(void){
printk(KERN_INFO "buzzer3 ON\n");
for (j=0; j<3; j++){
GPIO_SET(GPIO_BUZZER);
mdelay(100);
GPIO_CLR(GPIO_BUZZER);
mdelay(100);
}
}
//장치파일 열기
static int my_open(struct inode *inode, struct file *filp){
printk("device driver open! \n");
try_module_get(THIS_MODULE);
return 0;
}
//장치 파일 닫기
static int my_release(struct inode *inode, struct file *filp)
{
printk("<Ko> device driver release! \n");
module_put(THIS_MODULE);
return 0;
}
//장치파일에 데이터 쓰기
static ssize_t my_write(struct file *filp, const char *buf, size_t count, loff_t *f_pos)
{
printk("<Ko> write to buffer! %s\n", buf);
if(BUFF_SIZE < count){
sz_data = BUFF_SIZE;
}
sz_data = count;
strncpy(buffer, buf, sz_data);
printk("<Ko> buffer : %s, %d\n",buffer, sz_data);
return count;
}
//장치 파일에서 데이터 읽어 옴.
static ssize_t my_read(struct file *filp, char *buf, size_t count, loff_t *f_pos)
{
printk(KERN_DEBUG "<Ko> from, buffer %s\n", buffer);
// App의 read()로 보내는 buffer (사용자 값)
if(!strcmp(buffer, "1")){
copy_to_user(buf, "LED ON", 7);
}
else if(!strcmp(buffer,"2")){
copy_to_user(buf,"LED OFF",8);
}
return sz_data;
}
static long my_ioctl(struct file *flip, unsigned int cmd, unsigned long arg){
printk(KERN_DEBUG "<Ko> cmd : %d \n" ,cmd);
printk("<Ko> GPIO_GET(GPIO_LED): %d \n",GPIO_GET(GPIO_LED));
printk(KERN_DEBUG "IOCTRL_LED_ON : %d \n" ,IOCTRL_LED_ON);
switch(cmd){
case IOCTRL_LED_ON:
if(state == 0 | state == 2){
printk(KERN_INFO "LED ON in kernel\n");
GPIO_SET(GPIO_LED);
buzzer1();
state = 1;
}
break;
case IOCTRL_LED_OFF:
if(state == 1){
printk(KERN_INFO "LED OFF in kernel\n");
GPIO_CLR(GPIO_LED);
buzzer2();
state = 2;
}
break;
case IOCTRL_EXIT:
printk(KERN_INFO "App exit\n");
GPIO_CLR(GPIO_LED);
buzzer3();
state = 0;
break;
default:
printk(KERN_INFO "unknown menu!\n");
break;
}
return 0;
}
// 파일 동작 함수 연결
static struct file_operations gpio_fops = {
.owner = THIS_MODULE,
.read = my_read,
.write = my_write,
.open = my_open,
.release = my_release,
.unlocked_ioctl = my_ioctl
};
// cat//proc//devices -> 디바이스 드라이버 MAJOR_NUMBER 확인
// $sudo mknod /dev/gpio_led 256 0
// $sudo chmod 666 /dev/gpio_led
int __init my_init(void) {
dev_t devno;
unsigned int count;
static void* map = NULL; //I/O 접근을 위한 변수
int err;
printk(KERN_INFO "Hello module!\n");
//문자 디바이스를 등록
devno = MKDEV(MAJOR_NUMBER, 0);
register_chrdev_region(devno, 1, DEVICE_NAME);
//문자 디바이스를 위한 구조체를 초기화
cdev_init(&gpio_cdev, &gpio_fops);
gpio_cdev.owner = THIS_MODULE;
count = 1;
// 문자 디바이스를 추가
err = cdev_add(&gpio_cdev, devno, count);
if (err < 0) {
printk(KERN_ERR "ERROR : Device Add\n");
return -1;
}
//물리 주소를 가상 주소로 맵핑
map = ioremap(GPIO_BASE, GPIO_SIZE);
if (!map) {
printk(KERN_ERR "ERROR : mapping gpio memory\n");
iounmap(map);
return -1;
}
gpio = (volatile unsigned int *)map;
//LED 사용을 위한 초기화
GPIO_IN(GPIO_LED);
GPIO_OUT(GPIO_LED);
//부저 사용을 위한 초기화
GPIO_OUT(GPIO_BUZZER);
return 0;
}
void __exit my_exit(void){
dev_t devno = MKDEV(MAJOR_NUMBER, 0);
//문자 디바이스의 등록을 해제
unregister_chrdev_region(devno, 1);
//문자 디바이스의 구조체를 해제
cdev_del(&gpio_cdev);
if (gpio) {
//매핑된 메모리를 삭제
iounmap(gpio);
}
printk(KERN_INFO "Bye module!\n");
}
module_init(my_init);
module_exit(my_exit);
MODULE_AUTHOR("Ko");
MODULE_LICENSE("Rack");
#include <unistd.h>
//#include <fcntl.h>
#include <stdio.h>
#include <sys/fcntl.h>
#include <sys/ioctl.h>
#include <string.h>
#include <stdlib.h>
typedef enum {
IOCTRL_LED_ON = 1000,
IOCTRL_LED_OFF,
PROGRAM_EXIT
} ioctrlCmd_t;
int main(int argc, char **argv) {
int dev = 0;
//char buff[1024] = { 0,};
int menu = 0;
dev = open("/dev/gpio_led", O_RDWR); //open은 한번만 열면 됨
while(1){
printf("--------------------\nKERNEL Module Control 1.0\n--------------------\n");
printf("1. LED ON\n2. LED OFF\n3. EXIT\n");
printf("-------------------\n");
printf("menu : ");
scanf("%d", &menu);
switch(menu +999){
case IOCTRL_LED_ON:
ioctl(dev, IOCTRL_LED_ON);
break;
case IOCTRL_LED_OFF:
ioctl(dev, IOCTRL_LED_OFF);
break;
case PROGRAM_EXIT:
printf("Exit BYE\n");
ioctl(dev, PROGRAM_EXIT);
close(dev);
exit(0);
}
}
return 0;
}이해 안되는 코드
if (GPIO_GET(GPIO_LED) == 0x40000 ){
//부저 울림
printk(KERN_INFO "buzzer ON\n");
GPIO_SET(GPIO_BUZZER);
}
if (GPIO_GET(GPIO_LED) ==0){
//부저 꺼짐
printk(KERN_INFO "buzzer OFF\n");
GPIO_CLR(GPIO_BUZZER);
}

'임베디드 > KERNEL' 카테고리의 다른 글
| 라즈베리파이 test_gpio3_func.c 인터럽트 (0) | 2021.01.07 |
|---|---|
| FATAL: modpost: GPL-incompatible module 에러 (0) | 2021.01.07 |
| 라즈베리파이 gpio _led (0) | 2020.12.24 |
| GPIO 컨트롤 (0) | 2020.12.24 |
| test_dev3.c test_app3.c 메뉴띄우기 switch (0) | 2020.12.21 |


